Úvod do riadiacich systémov: Práca, typy a aplikácie
Riadiace systémy používate vždy, keď stroj automaticky udržiava stabilnú hodnotu, ako je teplota, rýchlosť alebo hladina.Tento článok vysvetľuje, čo je riadiaci systém, ako jeho časti spolupracujú a ako spätná väzba udržuje správny výstup.Uvidíte tiež hlavné typy systémov a ich správanie v prevádzke.Zahrnuté sú bežné použitia, výhody a limity.Katalóg
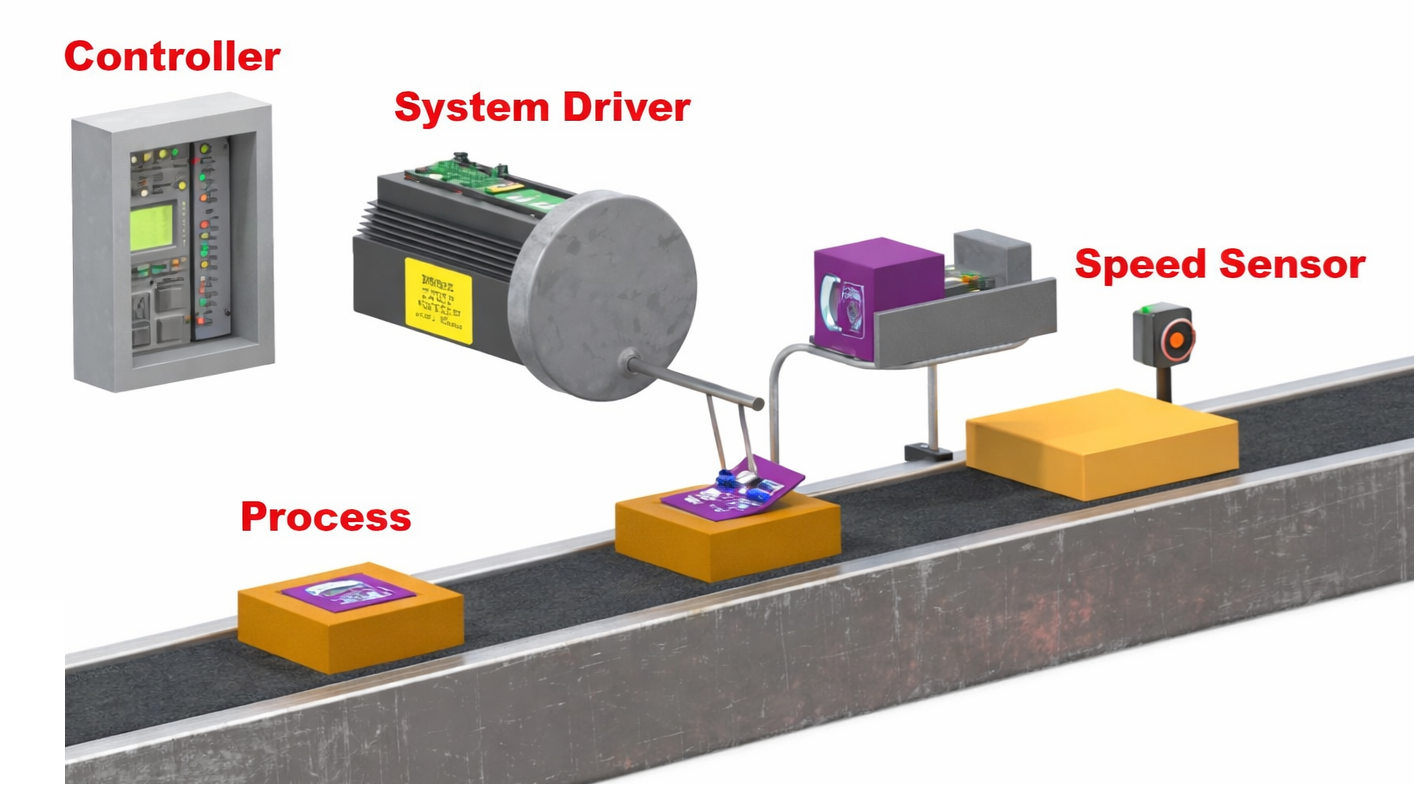
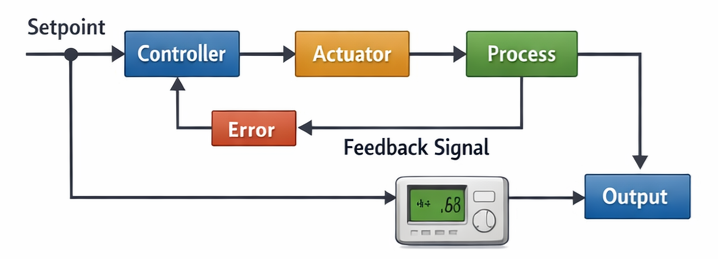
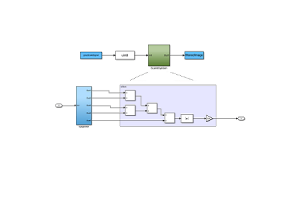
Obrázok 1. Príklad riadiaceho systému
Čo je riadiaci systém?
Riadiaci systém je systém, ktorý udržiava nameranú hodnotu blízko požadovanej cieľovej hodnoty.Jeho účelom je automaticky upraviť proces tak, aby výstup zostal správny aj pri zmene podmienok.Napríklad izbový termostat udržuje teplotu blízko nastavenej úrovne a tempomat udržiava vozidlo na zvolenej rýchlosti.Regulátor hladiny vody tiež udržuje výšku vody na zvolenej značke.Jednoducho povedané, riadiaci systém nepretržite kontroluje a koriguje premennú tak, aby zodpovedala požadovanej hodnote.
Základné prvky riadiaceho systému
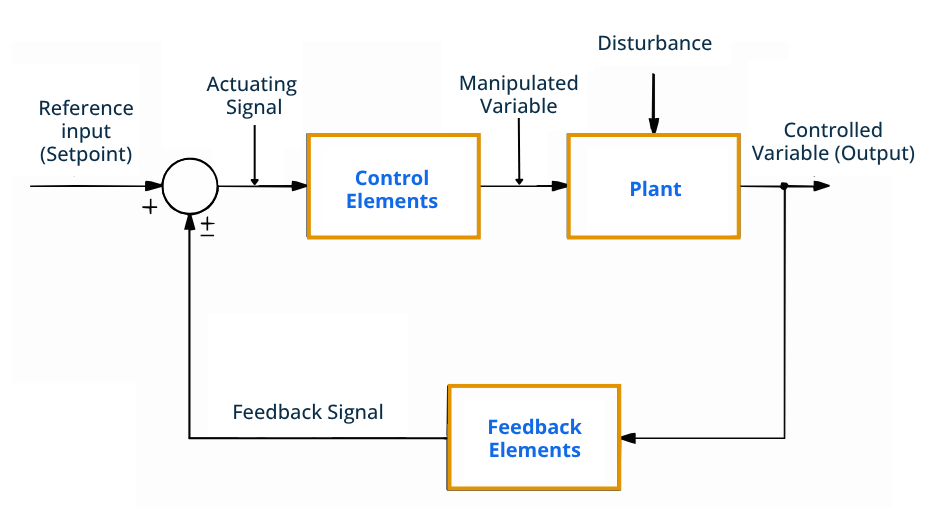
Obrázok 2. Bloková schéma riadiaceho systému
Riadiaci systém sa skladá z niekoľkých štandardných častí, z ktorých každá vykonáva špecifickú úlohu.
• Referenčný vstup (požadovaná hodnota)
Toto je požadovaná hodnota, ktorú sa systém snaží udržať.Predstavuje zvolený cieľový stav.Systém vždy porovnáva skutočnú hodnotu s touto referenciou.
• Aktivačný signál
Toto je signál vytvorený po porovnaní požadovaných a skutočných hodnôt.Predstavuje, koľko úprav je potrebné.Signál pripraví systém na korekciu.
• Ovládacie prvky
Tieto časti riadia proces rozhodovania.Určujú nápravné opatrenie na základe prijatého signálu.Výstup z tejto fázy pripraví proces na úpravu.
• Manipulovaná premenná
Toto je nastaviteľné množstvo odoslané do procesu.Zmena tejto hodnoty ovplyvňuje konečný výstup.Je to premenná, ktorú môže systém priamo meniť.
• Rastlina
Rastlina je riadený proces.Vytvára konečnú výstupnú hodnotu.Cieľom systému je udržať tento výstup na požadovanej úrovni.
• Rušenie
Ide o neželanú zmenu ovplyvňujúcu proces.Môže tlačiť výstup od požadovanej hodnoty.Systém to musí kompenzovať.
• Riadená premenná (výstup)
Toto je skutočný nameraný výsledok procesu.Ukazuje súčasný stav systému.Cieľom je udržať ho rovný referenčnému vstupu.
• Prvky spätnej väzby
Tieto merajú výstup a posielajú informácie späť na kontrolu.Poskytujú systému aktuálny stav.To umožňuje určiť korekciu.
• Signál spätnej väzby
Toto je vrátená informácia o výstupnej hodnote.Predstavuje stav procesu.Systém to používa na porovnanie.
Princíp činnosti riadiaceho systému
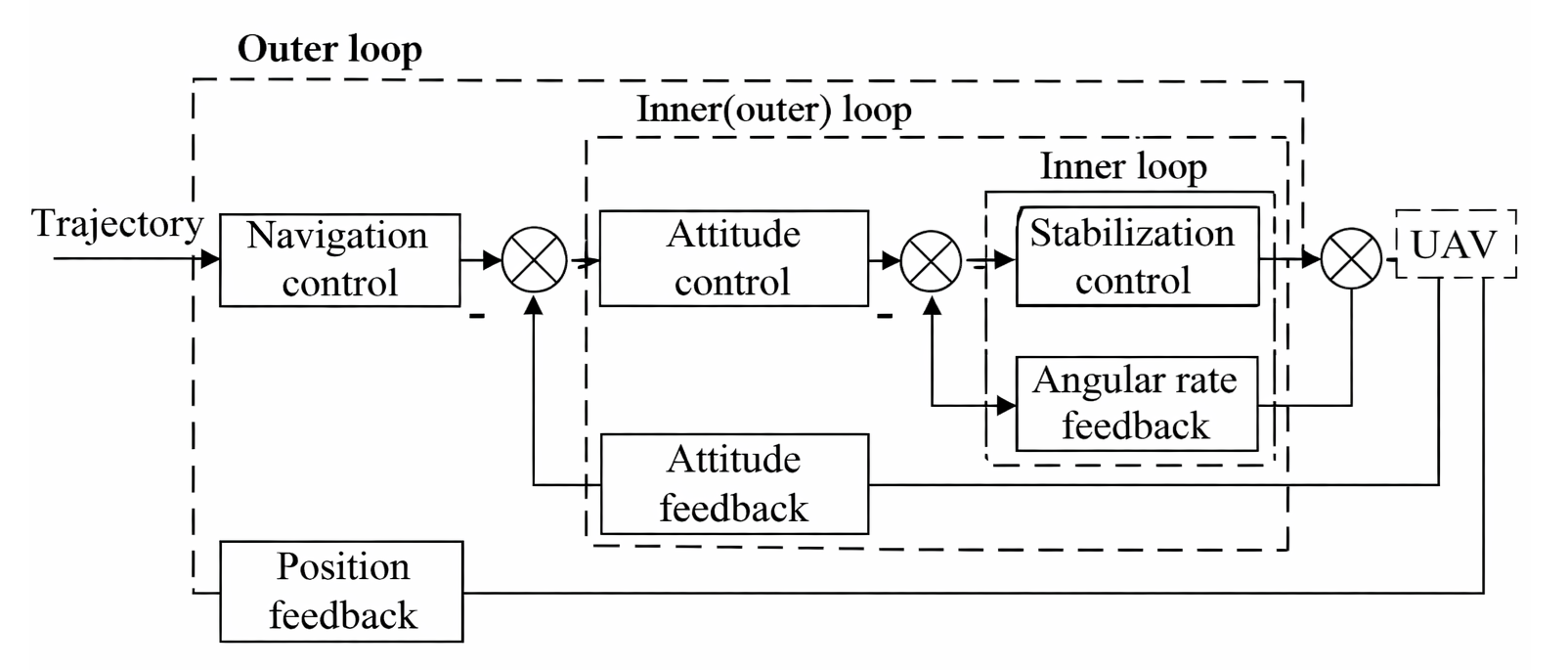
Obrázok 3. Princíp činnosti riadiaceho systému
Princíp činnosti riadiaceho systému začína pridelením požadovanej vstupnej hodnoty systému.Systém potom porovná túto hodnotu so skutočnou výstupnou hodnotou.Rozdiel medzi nimi sa nazýva chybový signál.Ak chyba existuje, systém vygeneruje opravný signál.Táto oprava upraví proces tak, aby sa znížila chyba.Výstup sa mení a znova sa priebežne kontroluje.Cyklus sa opakuje, kým sa výstup nezhoduje s požadovanou hodnotou.
Charakteristika riadiacich systémov
Riadiace systémy sa hodnotia na základe toho, ako dobre fungujú počas prevádzky.Tieto charakteristiky popisujú kvalitu a spoľahlivosť odozvy systému.
|
Charakteristika |
Popis |
|
Stabilita |
Výstup áno
nerozchádzajú sa;sa po poruche vráti na ustálenú hodnotu |
|
Presnosť |
Konečná chyba ≤
±2–5 % nastavenej hodnoty |
|
Presnosť |
Výstup
odchýlka ≤ ±1 % pri rovnakom vstupe |
|
Čas odozvy
|
Počiatočné
reakcia nastane v rámci meraného času oneskorenia (td) |
|
Čas vzostupu |
Čas od 10 %
na 90 % konečnej hodnoty |
|
Čas vyrovnania |
Vstúpi a
zostáva v pásme ±2 %. |
|
Prestreliť |
Vrchol presahuje
konečná hodnota podľa % sumy |
|
Ustálený stav
Chyba |
Neustále
offset zostávajúci po stabilizácii |
|
Citlivosť |
ΔVýstup /
ΔPomer zmeny parametrov |
|
Robustnosť |
Udržiava
prevádzky napriek zmene rušenia |
|
Šírka pásma |
Prevádzkuje
efektívne až do -3 dB medznej frekvencie |
|
Opakovateľnosť |
Rovnaký vstup
produkuje rovnaký výstup v rámci tolerancie |
|
Spoľahlivosť |
Prevádzkuje
bez poruchy pre menovitý prevádzkový čas (MTBF) |
|
Tlmenie |
Oscilácia
rozpad určený pomerom tlmenia ζ |
|
Rýchlosť
odpoveď |
Celkový čas do
dosiahnuť stabilný stav |
Typy riadiacich systémov
Riadiace systémy sú klasifikované na základe toho, ako narábajú s informáciami, signálmi a reakciou.Sú zoskupené podľa využitia spätnej väzby, formy signálu a matematického správania.
Riadiaci systém s otvorenou slučkou
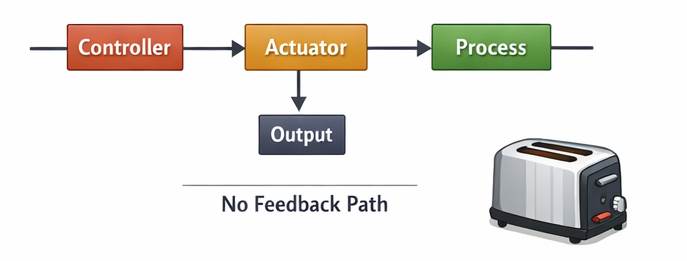
Obrázok 4. Schéma systému riadenia s otvorenou slučkou
Riadiaci systém s otvorenou slučkou je systém, v ktorom výstup neovplyvňuje činnosť riadenia.Systém odošle príkaz a bez kontroly predpokladá, že výsledok je správny.Pretože neexistuje žiadna spätná väzba, nemôže automaticky opraviť chyby alebo poruchy.Výkon závisí hlavne od správnej kalibrácie a prevádzkových podmienok.Tieto systémy sú jednoduché, lacné a ľahko sa navrhujú.Zmeny v záťaži alebo prostredí však môžu ovplyvniť konečný výsledok.Bežné príklady zahŕňajú časovač elektrického hriankovača, ovládanie časovača práčky a pevný časovač zavlažovania.
Systém riadenia s uzavretou slučkou
Obrázok 5. Schéma systému riadenia s uzavretou slučkou
Riadiaci systém s uzavretou slučkou je systém, ktorý využíva spätnú väzbu na automatické nastavenie výkonu.Systém zmeria výsledok a porovná ho s požadovanou hodnotou.Ak sa objaví rozdiel, použije sa oprava na zníženie chyby.Toto nepretržité nastavenie umožňuje presnú a stabilnú prevádzku aj pri rôznych podmienkach.Systémy s uzavretou slučkou poskytujú lepšiu presnosť a spoľahlivosť ako systémy s otvorenou slučkou.Sú široko používané v moderných aplikáciách automatického riadenia.Medzi typické príklady patrí ovládanie teploty klimatizácie, tempomat vozidla a automatické regulátory napätia.
Systém nepretržitého riadenia
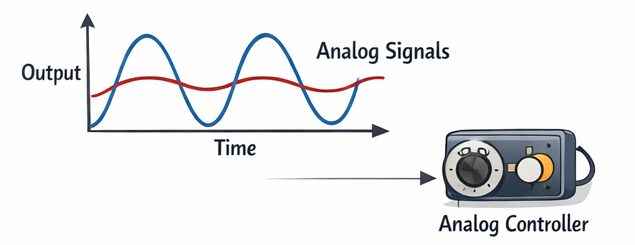
Obrázok 6. Nepretržitý (analógový) riadiaci signál
Systém nepretržitého riadenia spracováva signály, ktoré sa plynule menia v priebehu času.Vstup a výstup existujú v každom okamihu bez prerušenia.Tieto systémy zvyčajne pracujú s analógovými elektrickými alebo mechanickými signálmi.Pretože signály sú nepretržité, odozva je tiež hladká a prirodzená.Systémy so spojitým časom sa bežne vyskytujú v tradičných analógových regulátoroch.Sú vhodné pre fyzikálne procesy vyžadujúce okamžitú reakciu.Príklady zahŕňajú analógové regulátory rýchlosti, ovládanie hlasitosti audio zosilňovača a hydraulické ovládanie polohy ventilu.
Systém diskrétneho riadenia
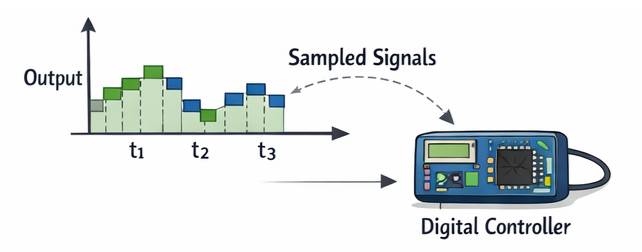
Obrázok 7. Diskrétny (digitálny) riadiaci signál
Systém riadenia s diskrétnym časom pracuje s použitím vzorkovaných dátových signálov.Systém kontroluje a aktualizuje hodnoty iba v určitých časových intervaloch.Tieto signály sú zvyčajne spracovávané digitálnymi ovládačmi alebo mikroprocesormi.Výstup sa mení krok za krokom, nie nepretržite.Takéto systémy umožňujú programovateľnú prevádzku a flexibilné nastavenie.Sú široko používané v modernom elektronickom a počítačovom riadení.Príklady zahŕňajú reguláciu teploty na základe mikrokontroléra, digitálnu reguláciu otáčok motora a inteligentné domáce termostaty.
Lineárny riadiaci systém

Obrázok 8. Vstupno-výstupný vzťah lineárneho systému
Lineárny riadiaci systém sleduje proporcionálny vzťah medzi vstupom a výstupom.Ak sa vstup zdvojnásobí, za rovnakých podmienok sa zdvojnásobí aj výstup.Tieto systémy spĺňajú princíp superpozície, kde kombinované vstupy vytvárajú kombinované výstupy.Lineárne správanie umožňuje predvídateľnú a jednoduchú matematickú analýzu.Väčšina teoretických návrhov riadenia predpokladá pre jednoduchosť lineárnu prevádzku.Lineárne modely pomáhajú pri navrhovaní stabilných a presných systémov.Príklady zahŕňajú elektronické zosilňovače s malým signálom a oblasti riadenia motora s nízkym zaťažením.
Nelineárny riadiaci systém
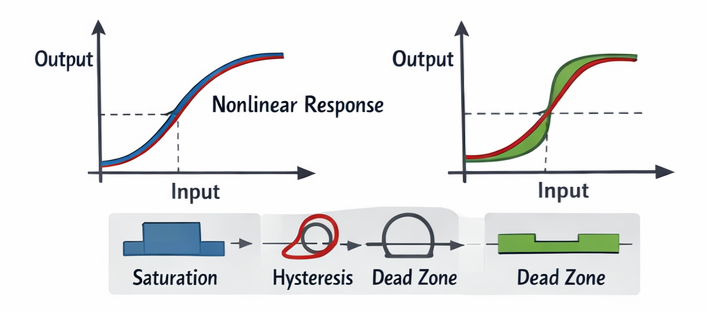
Obrázok 9. Charakteristiky odozvy nelineárneho systému
Nelineárny riadiaci systém má výstup, ktorý nie je úmerný vstupu.Odozva sa mení v závislosti od prevádzkového rozsahu alebo podmienok.Malé zmeny vstupu môžu spôsobiť veľké odchýlky vo výstupe alebo žiadne zmeny.Často sa objavujú efekty ako saturácia, hysterézia a mŕtve zóny.Tieto systémy sa ťažšie analyzujú, ale presnejšie predstavujú fyzikálne procesy.Mnohé systémy sa prirodzene správajú nelineárne.Príklady zahŕňajú limity pohybu robotického ramena, správanie magnetického pohonu a riadenie prietoku ventilu v extrémnych polohách.
Výhody a nevýhody riadiacich systémov
Riadiace systémy zlepšujú konzistenciu a znižujú manuálnu námahu, ale tiež prinášajú zložitosť a náklady.
Výhody riadiacich systémov
• Počas prevádzky systém udržuje výkon blízko požadovanej hodnoty.
• Operátor nemusí neustále nastavovať zariadenie ručne.
• Stroje môžu bežať dlhé hodiny bez častého zastavovania.
• Systém automaticky koriguje zmeny podmienok.
• Prevádzkový stav je možné kontrolovať z panela alebo vzdialeného displeja.
Nevýhody riadiacich systémov
• Náklady na nastavenie sú vyššie ako pri jednoduchých manuálnych systémoch.
• Na nastavenie a servis sú potrební kvalifikovaní pracovníci.
• Senzory a elektronické časti môžu časom zlyhať.
• Nájdenie príčiny problémov môže trvať dlhšie.
• Systém závisí od stabilného elektrického napájania.
Aplikácie riadiacich systémov
Riadiace systémy sa používajú v priemyselnej automatizácii aj v každodenných zariadeniach na automatické udržiavanie správnej prevádzky.
1. Priemyselná výroba
Výrobné stroje zachovávajú konzistentné rozmery a kvalitu produktu.Automatizované montážne linky využívajú reguláciu na zabezpečenie opakovateľnosti.Tým sa znižuje množstvo odpadu a zvyšuje sa účinnosť.
2. Regulácia teploty
Vykurovacie a chladiace zariadenia udržiavajú komfortné podmienky prostredia.Budovy sa spoliehajú na automatické nastavenie na stabilizáciu vnútornej klímy.To zlepšuje energetickú účinnosť a komfort.
3. Dopravné systémy
Vozidlá využívajú kontrolu rýchlosti a stability pre plynulejšiu prevádzku.Moderné autá obsahujú tempomat a trakčné systémy.Tie zlepšujú bezpečnosť a výkon jazdy.
4. Energetické systémy
Elektrické siete regulujú úrovne napätia a frekvencie.Generátory upravujú výkon tak, aby zodpovedal požiadavkám na zaťaženie.Tým je zabezpečená stabilná dodávka elektriny.
5. Robotika a automatizácia
Roboty vykonávajú presné polohovanie a pohybové úlohy.Automatizované stroje pracujú nepretržite s vysokou presnosťou.To umožňuje pokročilú výrobu.
6. Zdravotnícke vybavenie
Zariadenia udržiavajú počas liečby kontrolované prevádzkové podmienky.Monitorovacie zariadenie udržiava hodnoty v bezpečných medziach.To zvyšuje bezpečnosť a spoľahlivosť pacienta.
7. Domáce spotrebiče
Každodenné zariadenia automaticky spravujú nastavenia prevádzky.Práčky a chladničky udržiavajú správne prevádzkové podmienky.To zjednodušuje každodenné úlohy.
8. Letecké systémy
Lietadlá a drony udržiavajú stabilné letové podmienky.Automatické navádzanie udržuje správnu orientáciu a nadmorskú výšku.To podporuje spoľahlivú navigáciu.
Riadiaci systém vs automatizácia vs vstavané systémy
Tieto technológie spolu úzko súvisia, ale slúžia na rôzne inžinierske účely v rámci moderných elektronických a priemyselných produktov.
|
Funkcia |
Kontrola
Systém |
automatizácia |
Vložené
Systém |
|
Hlavné zameranie |
Regulácia z
premenných |
Proces
exekúcie |
Zariadenie
prevádzka |
|
Účel |
Udržiavať
požadovanú hodnotu |
Vykonajte úlohy
automaticky |
Beh venovaný
funkcie |
|
Rozsah |
Špecifické
procesné správanie |
Celý
pracovný postup
|
Slobodný
produktové zariadenie |
|
rozhodnutie
Schopnosť |
Na základe
namerané hodnoty |
Na základe
naprogramovaná logika |
Na základe
firmvéru |
|
Použitie spätnej väzby |
Často
požadované |
Voliteľné |
Voliteľné |
|
Typ hardvéru |
Senzory a
aktuátory |
Stroje a
ovládače |
Mikrokontrolér
doska |
|
Softvérová rola |
Výpočet
a náprava |
Sekvenovanie
a koordináciu |
Zariadenie
kontrolná logika |
|
Typ odpovede |
Nepretržitý
úprava |
Úloha
exekúcie |
Funkčná prevádzka |
|
Veľkosť systému |
Malé až
stredná |
Stredná až
veľký |
Veľmi malý |
|
Flexibilita |
Mierne |
Vysoká |
Obmedzené |
|
Čas
Požiadavka |
Vysoká |
Mierne |
Vysoká |
|
Aplikácia
úroveň |
Úroveň procesu |
Úroveň rastlín |
Úroveň produktu |
|
Príklad |
Teplota
ovládanie |
Fabrika
výrobnej linky |
Inteligentné hodinky |
|
integrácia |
Súčasťou
automatizácie |
Obsahuje
riadiacich systémov |
Podporuje oboje |
Záver
Riadiace systémy udržiavajú stabilitu neustálym porovnávaním skutočného výkonu s cieľovou hodnotou a opravovaním akejkoľvek chyby.Ich výkon závisí od základných prvkov, ako je spätná väzba, činnosť regulátora a riadený proces.Rôzne klasifikácie definujú, ako sa zaobchádza so signálmi a ako presne systém reaguje na poruchy.Vďaka týmto schopnostiam sú riadiace systémy široko používané v priemysle, doprave, energetike, lekárskych prístrojoch a každodennom vybavení.
O nás
ALLELCO LIMITED
Čítaj viac
Rýchly dopyt
Zašlite prosím dotaz, okamžite odpovieme.
často kladené otázky [FAQ]
1. Aký je rozdiel medzi regulátorom a riadiacim systémom?
Regulátor je iba rozhodovacím zariadením (ako PLC alebo PID regulátor).Riadiaci systém zahŕňa regulátor plus senzory, akčné členy a regulovaný proces.
2. Čo je PID regulácia a prečo je dôležitá?
Regulácia PID využíva proporcionálne, integrálne a derivačné akcie na rýchle a hladké minimalizovanie chýb.Zlepšuje stabilitu, presnosť a rýchlosť odozvy vo väčšine priemyselných systémov.
3. Prečo riadiace systémy niekedy oscilujú alebo lovia?
Oscilácia nastáva, keď sú korekcie príliš agresívne alebo oneskorené.Zlé ladenie, pomalé snímače alebo nadmerné zosilnenie spôsobujú opakované prekmitanie výstupu.
4. Čo je saturácia pohonu?
K saturácii pohonu dôjde, keď pohon dosiahne svoj fyzický limit a nemôže ďalej zvyšovať výkon.To zabraňuje systému opravovať veľké chyby.
5. Ako riadiace systémy zvládajú oneskorenia v procesoch?
Používajú metódy ladenia, filtre alebo prediktívne algoritmy na kompenzáciu oneskorenia, aby sa korekcia uskutočnila v správnom čase.

Sprievodca rezistorom 4,7 kΩ: Farebný kód, použitie, testovanie a porovnanie hodnôt
na 2026/02/16

Miniatúrny istič (MCB): Pracovný princíp, typy, hodnotenia a sprievodca výberom
na 2026/02/15
Populárne príspevky
-

Komplexné súpravy inštrukcií: Ako zmenili výpočty?
na 8000/04/18 147780
-

USB-C Pinout a funkcie
na 2000/04/18 112042
-
Pomocou Xilinx Unified Simulation Primitive: Komplexný sprievodca dizajnom a simuláciou FPGA
na 1600/04/18 111352
-
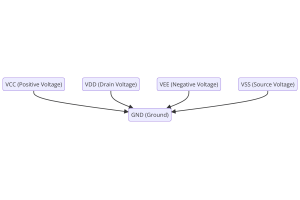
Napájacie napätia v elektronike: Význam VCC, VDD, VEE, VSS a GND
na 0400/04/18 83806
-

Sprievodca konektorom RJ45: Pinout, kábly, typy káblov a použitia
na 1970/01/1 79605
-
Konečný sprievodca k farebným kódom drôtu v moderných elektrických systémoch
Spôsob, akým naše elektrické systémy používajú farby, nie je len pre vzhľad.Každá farba drôtu teraz označuje špecifickú funkciu, čo uľahčuje správne identifikáciu a spracovanie elektrických kompone...na 1970/01/1 66986
-

Sprievodca čistením ventilu: funkcia, príznaky, testovanie a výmena za optimálny výkon motora
Čistý ventil je kľúčovou súčasťou systému automobilu, ktorý pomáha udržiavať vzduch čistý riadením výparov paliva skôr, ako môžu uniknúť do atmosféry.To nielen pomáha životnému prostrediu znížením ...na 1970/01/1 63113
-

Kvalita (Q) Faktor: Rovnice a aplikácie
Faktor kvality alebo „Q“ je dôležitý pri kontrole, ako dobre induktory a rezonátory pracujú v elektronických systémoch, ktoré používajú rádiové frekvencie (RF).'Q' meria, ako dobre obvod minimalizu...na 1970/01/1 63048
-
Dosiahnutie maximálneho výkonu s maximálnou vetou prenosu energie
Maximálna veta prenosu energie vysvetľuje, ako energia zo zdroja, napríklad batéria alebo generátor, tečie na pripojené zaťaženie.Zobrazuje presnú podmienku, keď zaťaženie prijíma najviac energie.T...na 1970/01/1 54097
-

Špecifikácie batérie A23 a kompatibilita
Batéria A23 je malá batéria v tvare valca s vysokým napätím.Nazýva sa tiež 23A, 23ae alebo MN21, beží na 12 voltoch a oveľa vyšších ako batérie AA alebo AAA.Vďaka jeho špeciálnemu dizajnu ...na 1970/01/1 52199
Horúce číslo dielu
-

FH19SC-32S-0.5SH(05)
Hirose Electric Co Ltd
CONN FFC BOTTOM 32POS 0.5MM R/A
VLCF4018T-6R8NR94-2
TDK Corporation
FIXED IND 6.8UH 940MA 124MOHM SM
PC355NTJ000F
Sharp Microelectronics
OPTOISO 3.75KV DARL 4-MINI-FLAT
CC2533F96RHAT
Texas Instruments
IC RF TXRX+MCU 802.15.4 40VFQFN
IPP50R399CP
Infineon Technologies
IPP50R399 - 500V COOLMOS N-CHANN
SN74LVC1G08DBVT
Texas Instruments
IC GATE AND 1CH 2-INP SOT23-5
VT388FCX-ADJ-001
Analog Devices Inc./Maxim Integrated
IC REG LINEAR PWR MGMT
LM341T-15
Texas Instruments
IC REG LIN FIXED POS STD REG 12V
08051C472JAZ2A
KYOCERA AVX
CAP CER 4700PF 100V X7R 0805
MAX941EUA+
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 1 W/LATCH 8UMAX
DDTC142TU-7-F
Diodes Incorporated
TRANS PREBIAS NPN 200MW SOT323
CC1210KKX5R8BB106
YAGEO
CAP CER 10UF 25V X5R 1210
TCA0G336M8R
KYOCERA AVX
CAP TANT 33UF 20% 4V 1206
BLE32PN300SN1L
Murata Electronics
FERRITE BEAD 30 OHM 1210 1LN
IDT71V124SA15Y
Renesas Electronics America Inc
IC SRAM 1MBIT PARALLEL 32SOJ
RT0805BRD078K2L
Yageo
RES SMD 8.2K OHM 0.1% 1/8W 0805
FCMT199N60
onsemi
MOSFET N-CH 600V 20.2A POWER88
DAC7624UB
Texas Instruments
IC DAC 12BIT V-OUT 28SOIC -

CC0805JRX7R7BB473
YAGEO
CAP CER 0.047UF 16V X7R 0805
MAX6861UK17+T
Analog Devices Inc./Maxim Integrated
IC MPU SUPERVISOR SOT23-5
EFM32TG11B120F128GQ48-A
Silicon Labs
IC MCU 32BIT 128KB FLASH 48TQFP
MAX603EPA+
Analog Devices Inc./Maxim Integrated
IC REG LIN POS ADJ 500MA 8DIP
0805ZD105MAT4A
KYOCERA AVX
CAP CER 1UF 10V X5R 0805
MC8641DVJ1000NE
NXP USA Inc.
IC MPU E600 DUAL CORE 1023FCCBGA
MAX1037EKA+T
Analog Devices Inc./Maxim Integrated
IC ADC 8BIT SAR SOT23-8
STM1811MWX7F
STMicroelectronics
IC SUPERVISOR 1 CHANNEL SOT23-3
STL16N1VH5
STMicroelectronics
MOSFET N-CH 12V 16A POWERFLAT
STM32F479NIH6
STMicroelectronics
IC MCU 32BIT 2MB FLASH 216TFBGA
LMC6462BIMX
Texas Instruments
IC CMOS 2 CIRCUIT 8SOIC
AD8276ARMZ-R7
Analog Devices Inc.
IC OPAMP DIFF 1 CIRCUIT 8MSOP
HCPL-3120-560E
Broadcom Limited
OPTOISO 3.75KV 1CH GATE DVR 8SMD
PI3C3126LE
Diodes Incorporated
IC BUS SWITCH 1 X 1:1 14TSSOP
CL10C680JB8NFNC
Samsung Electro-Mechanics
CAP CER 68PF 50V C0G/NP0 0603
C1608X7R1H473K080AA
TDK Corporation
CAP CER 0.047UF 50V X7R 0603
TRF3761-BIRHAT
Texas Instruments
IC INTEGER N SYNTH 40VQFN
SN74LVC161284DGGR
Texas Instruments
IC BUS INTERF TRI-STATE 48-TSSOP -

MLG1005S24NHT000
TDK Corporation
FIXED IND 24NH 350MA 700MOHM SMD
12101C823KAT2A
KYOCERA AVX
CAP CER 0.082UF 100V X7R 1210
EP20K300EQC240-2X
Intel
IC FPGA 152 I/O 240QFP
MSP430FR5970IPMR
Texas Instruments
IC MCU 16BIT 32KB FRAM 64LQFP
MD27C64-20/B
Rochester Electronics, LLC
64K (8K X 8) EPROM
LTC1443IS#TRPBF
Analog Devices Inc.
IC COMPARATOR 4 W/VOLT REF 16SO
LTC2246CUH#PBF
Analog Devices Inc.
IC ADC 14BIT PIPELINED 32QFN
MAX6470TA15BD3+T
Analog Devices Inc./Maxim Integrated
IC REG LDO 1.5V/ADJ 0.3A 8TDFN
572D107X0010T2T
Vishay Sprague
CAP TANT 100UF 20% 10V 1411
AK2368
Asahi Kasei Microdevices/AKM
IC LSI BASE-BAND
ADP2140ACPZ1233R7
Analog Devices Inc.
IC REG DL BUCK/LNR SYNC 10LFCSP
BF1118WR
NXP USA Inc.
IC RF SWITCH SOT343N
MC74ACT86DR2G
onsemi
IC GATE XOR 4CH 2-INP 14SOIC
TPS628132DQWRWYRQ1
Texas Instruments
AUTOMOTIVE 2.75-V TO 6-V, 3-A ST
TPA6139A2RGTT
Texas Instruments
IC AMP CLASS AB STER 25MW 16QFN
MMCX-R-PC(40)
Hirose Electric Co Ltd
CONN MMCX RCPT STR 50 OHM PCB
74VHC123AM
Fairchild Semiconductor
MONOSTABLE MULTIVIBRATOR, AHC/VH
C1005X7R1E333M
TDK Corporation
CAP CER 0.033UF 25V X7R 0402